系统展示
提供优质服务项目,为企业量身定制开发系统。

无人机侦测防御系统
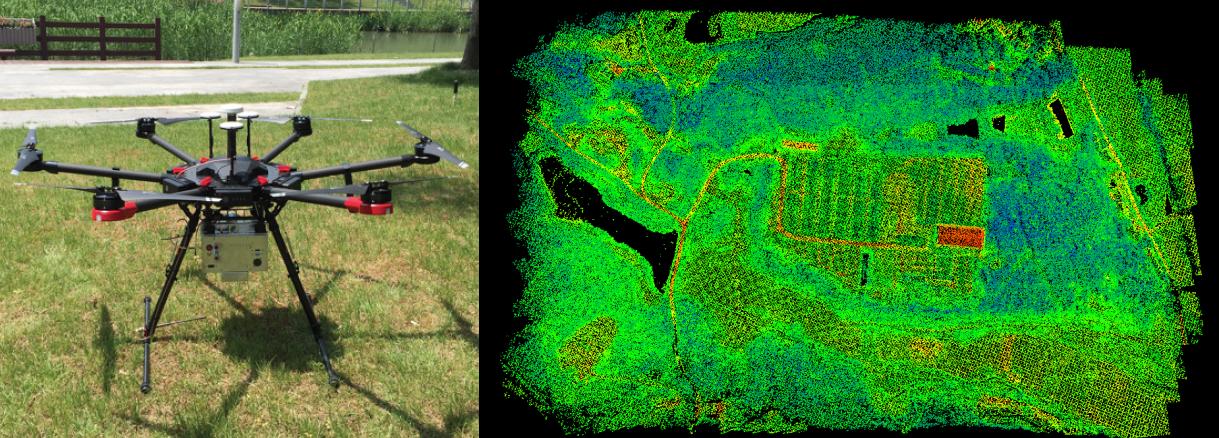
系统简介:系统综合运用频谱侦测、雷达探测、光电识别跟踪,电磁干扰等技术,实现对无人机等目标的频谱测向定位、雷达捕获跟踪、光电跟踪及识别、电磁干扰处置等,达到多手段侦察、分级别预警、分层次反制的目的,保障区域低空安全。
系统特点:■ 分级预警: 实现对无人机入侵事件进行实现分级管理,既保 障空域安全,降低空域管理压力,也尽可能多的 给予无人机用户自由飞行的权益,促进无人机行 业的健康发展。从而消除相关管理部门对无人机 在机场出现的过度反应和彻底忽视的对偶问题。 ■ 多手段联合侦测: 综合运用城市复杂电磁环境下的无人机信号实时 检测和识别技术、城市复杂地物环境下的低慢 小目标检测和提取、基于分布式实时计算引擎 JStorm 和 FPGrowth 算法的异构多源数据融合处 理等技术,实现对无人机及无人机机群的全天候、 全天时的联动侦测、定位跟踪。 ■ 大数据时空分析: 针对不同时段的监控数据,自动生成热点地图和 统计数据图表。
固定式地面三维重构系统
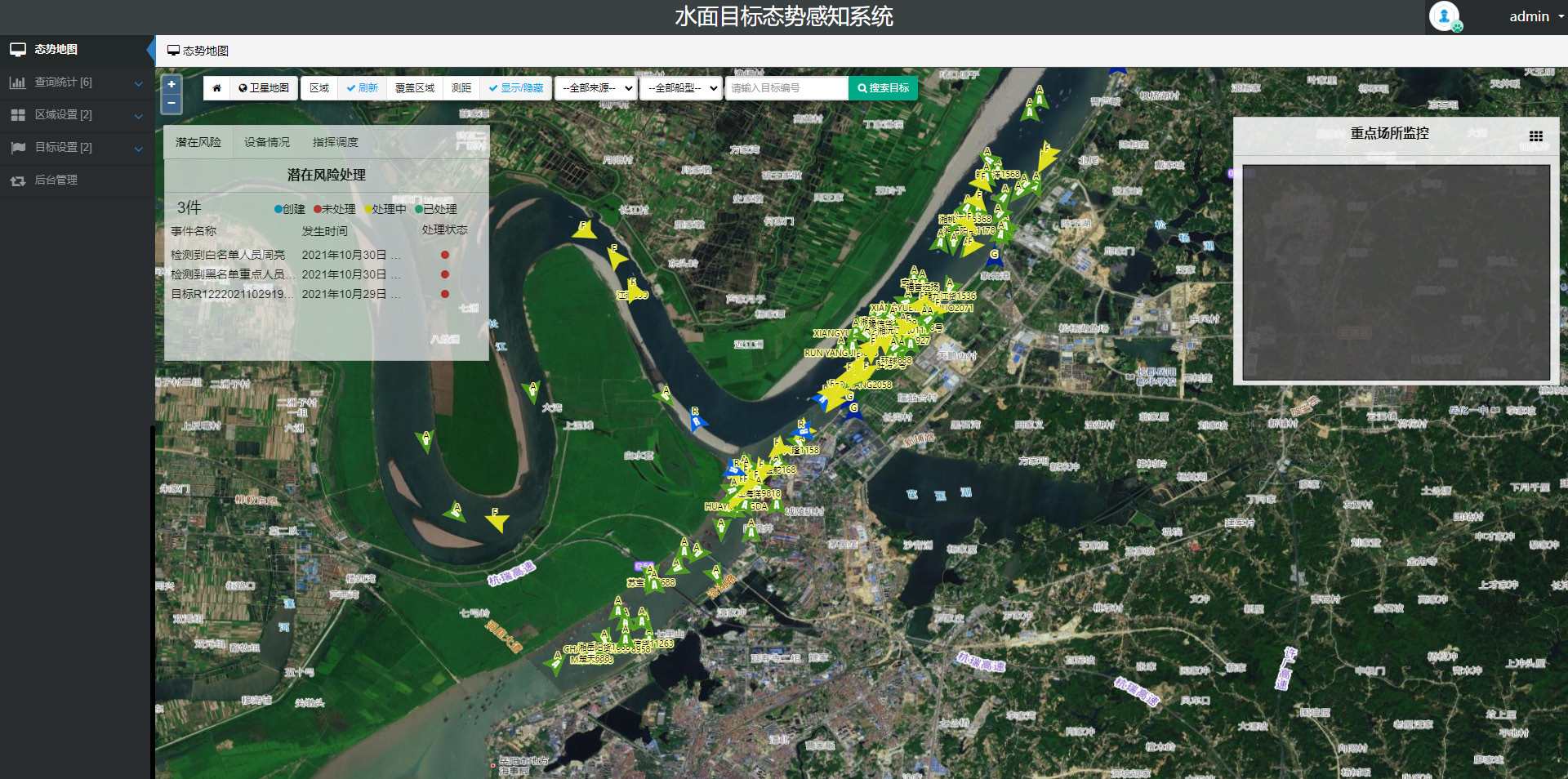
系统简介:固定式地面三维重构系统采用了高精度自动化配准和表面重建技术,具有分辨率高、精 度高、扫描速度快、设备集成度高、小巧便携、成本低、模块性强等特点。该系统主要由激 光雷达、带编码器的电机和处理机组成,传感器采用独特的非重复扫描方式,能有效提升视 场覆盖率,满足多种应用需求,例如在固定环境中进行 3D 扫描,当扫描积分时间为 0.1 秒时, 视场覆盖范围可媲美 32 线机械扫描的 LiDAR 激光雷达。随着扫描时间增加,视场覆盖范围 也会递增,积分时间达到 0.5 秒时,视场覆盖范围可媲美 64 线 LiDAR 激光雷达。可以广泛应 用于室内建图、大场景自动化点云数据的采集、物体三维重建等领域。此外,还可以根据用 户不同的需求,选配不同的激光雷达作为探测设备。
系统特点:■ 基于激光雷达探测 ■ 采用高精度点云配准技术 ■ 高精度点云重建技术 ■ 采集速度快、精度高、分辨率高、探测距离远
移动式地面三维重构系统
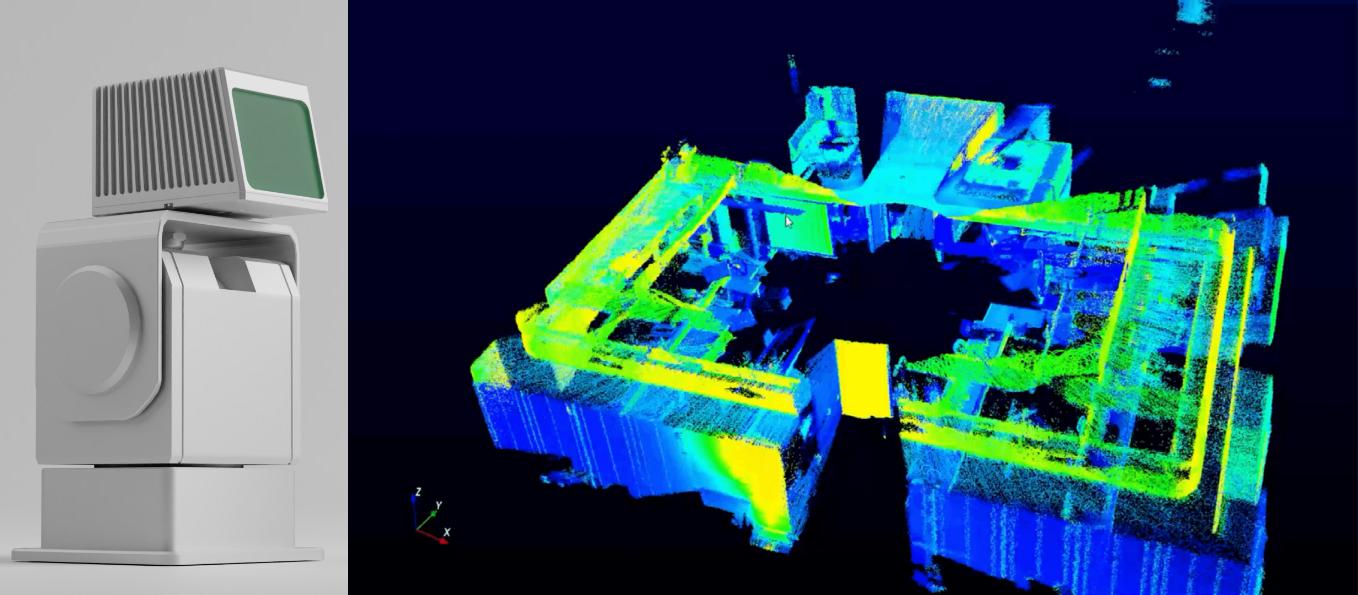
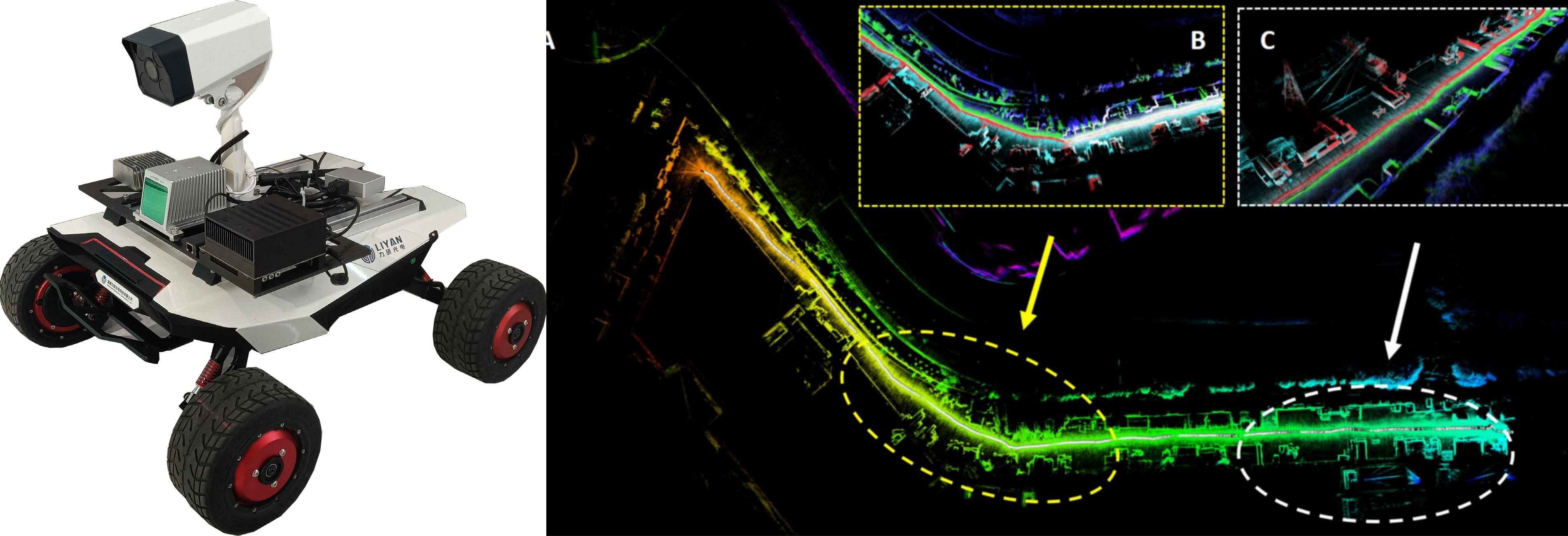
系统简介:移动式地面三维重构系统采用了移动目标检测技术、目标识别技术、自动化高精度配准技术、 视觉里程计技术、点云图像结合技术等先进技术。具有分辨率高、精度高、扫描速度快、设备 集成度高、小巧便携、成本低、模块性强等特点。该系统主要由激光雷达、IMU、相机和移动 载体组成,传感器采用独特的非重复扫描方式,能有效提升视场覆盖率,满足多种应用需求, 可以广泛应用于点云数据采集、室内外场景建模等领域。
系统特点:■ 基于激光雷达探测 ■ 采用高精度点云配准技术 ■ 高精度点云重建技术 ■ 采用点云图像结合技术 ■ 目标检测与识别技术 ■ 采集速度快、精度高、分辨率高、探测距离远